|
Проект: "Моделирование адаптивных
алгоритмов управления траекторным движением манипуляционных роботов на
параллельных вычислительных структурах"
Содержание:
авторы проекта
основные результаты
области применения
выступления
авторов по тематике данного проекта
обоснование проекта
адаптивные алгоритмы
управления манипуляционным роботом
программный моделирующий комплекс
результаты моделирования
параллельные
системы Центра Сетевых и Параллельных Технологий
в настоящее время
литература
|
Авторы проекта
Научный руководитель - заслуженный деятель науки и техники РФ, д.т.н.,
профессор кафедры САУ СПбГЭТУ Борцов Ю.А.;
специализация: интеллектуально-адаптивное управление электротехническими
комплексами;
д.т.н., профессор Поляхов Н.Д.; специализация: интеллектуально-адаптивное
управление электротехническими комплексами;
д.т.н, профессор, зав. кафедрой САУ, Путов В.В.
к.т.н., доцент Второв В.Б.; специализация: адаптивное и робастное
управление динамическими системами;
аспирант Иншаков Д.Ю.
Пишите: inshakov@mail.ru
|


|
Основные результаты
Разработан и отлажен программный комплекс для моделирования на параллельных
процессорах динамики траекторного движения робота-манипулятора.
Проведено моделирование траекторного движения манипулятора класса PUMA-560
с различными, в т.ч. адаптивными алгоритмами управления.
За счет применения адаптивного управления достигнуто улучшение на порядок
динамической точности отработки траектории на высоких скоростях .
На основе сравнительного анализ эффективности различных методов распараллеливания
сделан вывод, что для моделирования и управления многостепенным роботом
наилучшим образом подходит геометрический параллелитзм [8].
Области применения
Проектирование новых и модернизация уже существующих систем управления
роботов с позиций повышения динамической точности воспроизведения ими заданных
траекторных движений.
Выступления
авторов по тематике данного проекта
второй международный симпозиум "Интеллектуальные системы". Санкт-Петербург,
1-4 июля 1996г.
1st Int. conf. "Applications of computer systems". Szczecin, 1994.
"1-ая Международная (12-ая Всероссийская) конференция по автоматизированному
электроприводу"
26-28 сентября 1995 г., Санкт-Петербург.
разработанное программное обеспечение демонстрировалось на выставке в Госкомвузе
РФ, проходившей в Москве в феврале 1995 года.
"Третья Санкт-Петербургская Ассамблея молодых ученых и специалистов", Санкт-Петербург,
4-11 декабря 1998г.
"Fifth Baltic Olympiad on Automatic Control (BOAC'96). St.-Petersburg,
October 2-4, 1996".
Обоснование проекта
При рассмотрении задачи управления манипуляционным роботом необходимо прежде
всего определить цель управления. В наиболее типичных приложениях она состоит
в обеспечении достаточно быстрого и точного перемещения из одной заданной
точки в другую. М. Вукобратович [4] акцентировал внимание
и на другой задаче - обеспечения "практической устойчивости" движения схвата
манипулятора вдоль заданной пространственной траектории, которая означает
требование ограниченности отклонений фактической траектории от заданной
(номинальной). Следует отметить, что манипуляционный робот с высокой точностью
позиционирования (т.е. статической точностью), например PUMA-560, может
и не обладать достаточной динамической точностью.
Основная причина повышенного интереса к адаптивным методам управления
роботами состоит в том, что некоторые приложения робототехники к технологическим
задачам требуют высокой точности воспроизведения заданной траектории (например,
роботы испытательных стендов, сборочные роботы, робототехнические имитаторы
маловысотных полетов, роботы лазерных технологических стендов, роботы для
аварийных и чрезвычайных ситуаций, космические роботы и т.д.). Требуемой
в этих задачах точности невозможно достичь путем применения линейной обратной
связи в силу существенной нелинейности уравнений манипулятора, а также
зависимости коэффициентов последних от массы переносимого груза.
Адаптивные
алгоритмы управления манипуляционным роботом
В настоящее время уже известно значительное число различных глобально устойчивых
алгоритмов адаптивного управления манипуляторами, большинство из которых
может быть получено путем применения стандартных процедур метода скоростного
градиента при надлежащем выборе целевого функционала и выражения для ошибки
[3].
Однако, многие существующие адаптивные алгоритмы не полностью решают
проблему построения систем автоматического управления манипуляторами, рассчитанных
на реальное, в том числе промышленное, применение[1, 2,
7]. Во-первых, препятствием для реализации глобально устойчивых
адаптивных алгоритмов управления манипуляторами является трудность выполнения
в реальном масштабе времени объема вычислений, необходимого для реализации
даже простейшего алгоритма типа Слотина-Ли [6] для шестистепенного
антропоморфного манипулятора типа PUMA-560. Вторая причина, более принципиальная,
состоит в том, что все глобально устойчивые адаптивные алгоритмы ориентированы
на так называемую параметрическую неопределенность уравнений объекта, то
есть на знание математического описания объекта с точностью до конечного
числа постоянных параметров. При таком подходе все составляющие нелинейного
описания объекта должны быть скопированы в законе управления, а следовательно,
эти составляющие должны быть точно известны. На практике же достаточно
точную модель объекта построить нелегко, а иногда и невозможно. Иными словами,
глобально устойчивые адаптивные алгоритмы рассчитаны на меньший уровень
неопределенности, чем тот, который обычно имеет место в практических задачах.
Поэтому в основу подхода к построению адаптивных систем управления манипуляторами,
ориентированных на применение в реальных условиях, целесообразно положить
иные принципы, исключающие точное копирование нелинейностей объекта и,
следовательно, рассчитанные на больший уровень неопределенности.
Так, проф. В.В.Путов выдвинул подход к построению приближенных алгоритмов
адаптивного управления, названный им методом мажорирующих функций [1].
В частности, для достаточно широкого класса нелинейных динамических объектов
предложена процедура построения адаптивного управления, в которой используются
лишь специально вводимые оценочные функции переменных состояния объекта
и вектора управления, скорость роста которых при бесконечном возрастании
аргумента не ниже, чем скорость роста соответствующих составляющих правых
частей дифференциальных уравнений объекта.
Для реализации указанного выше закона управления в реальном времени
ввиду его сложности и необходимости взаимосвязанного управления несколькими
сочленениями робота наилучшим образом подходят процессоры, ориентированные
на параллельные вычисления. При этом адаптивные алгоритмы управления взаимосвязанным
многостепенным объектом естественным образом декомпозируются по степеням
подвижности [2]. Это же относится и к математическим моделям
самого объекта (робота), но при практической реализации параллельной модели
в большинстве случаев требуется дополнительная балансировка загрузки процессоров
ввиду различной сложности правых частей уравнений для каждого сочленения
[8].
Программный моделирующий комплекс
 |
Под научным руководством проф. Ю.А.Борцова
авторами настоящей работы совместно с канд. техн. наук А.В.Савиловым на
базе транспьютерного модуля Multicluster MC-3 (фото)
разработан и отлажен программный комплекс (фото)
для моделирования динамики траекторного движения трехзвенного манипулятора
[2]. Отладка и тестирование комплекса производились на
оборудовании фирмы Parsytec
Computer GmbH в Центре
Сетевых и Параллельных Технологий при Технопарке СПбГЭТУ. |
Результаты
моделирования
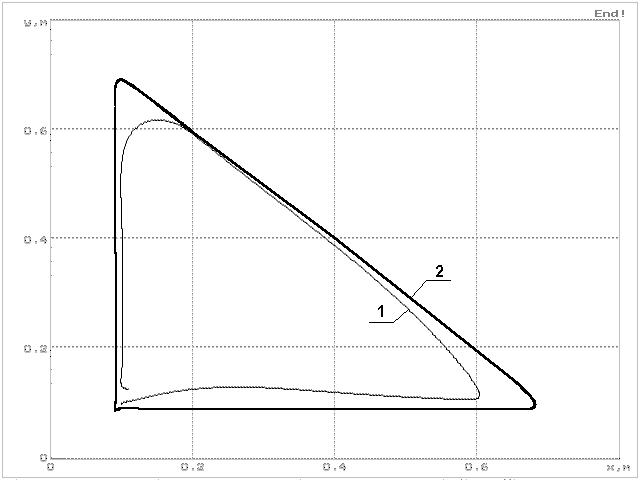 На рисунке показаны результаты моделирования траекторного движения
манипулятора PUMA-560 при скорости движения схвата 1,0 м/с и задающей траектории
вида треугольник (1 - при линейном алгоритме управлени, 2 - при адаптивном).
На рисунке показаны результаты моделирования траекторного движения
манипулятора PUMA-560 при скорости движения схвата 1,0 м/с и задающей траектории
вида треугольник (1 - при линейном алгоритме управлени, 2 - при адаптивном).
Проведенное сравнение эффективности алгоритмов показало, что применение
адаптивного управления повышает динамическую точность отработки траектории
минимум на порядок (при высоких скоростях).
Полученные в ходе моделирования траектории движения манипулятора при
различных скоростях и алгоритмах управления можно посмотреть здесь.
За счет реализации адаптивного управления в виде параллельного алгоритма
на трех транспьютерах время расчета управления составило величину менее
1мс.
 |
Параллельные
системы Центра Сетевых и Параллельных Технологий |
| характеристика |
Multiclaster MC-3 |
Parsytec CC-6 |
| Базовый процессор |
транспьютер T-805 |
Power PC |
| Производительность процессора |
4,6 Mflops |
266 Mflops |
| Скорость передачи по линиями связи |
20 Mbit/s |
20 Mbit/s |
| Число процессоров |
16 |
6 |
| Общая (пиковая) производительность |
73 Mflops |
1600 Mflops |
В настоящее время
 |
Сейчас ведется работа по переориентации ранее разработанного программного
моделирующего комплекса для работы на современном параллельном суперкомпьютере
Parsytec CC-6, который представляет собой 6-процессорную систему (см. табл.и
рисунок). Возможности параллельного исполнения задания опираются на работу
с «быстрыми связями».
Интерфейсом к параллельной системе является операционная система Embadded
PARIX , специально разработанная для синхронизации параллельных вычислений.
|
Литература
-
Путов В.В. Адаптивные системы с алгоритмами настройки высшего
порядка в управлении нелинейными объектами // Структуры сложных систем
и алгоритмы управления: Сб. науч. статей. Л.: Изд-во ЛГУ, 1990. С. 147-159
(Вопросы теории САУ, вып.8).
-
Транспьютерная реализация адаптивных структур управления
роботом-манипулятором / Ю.А.Борцов, В.Б.Второв, А.В.Савилов, Д.Ю.Иншаков
// Электротехника. 1996. N10. С.1-5.
-
Фомин В.Н., Фрадков А.Л., Якубович В.Н. Адаптивное управление
динамическими объектами. - М.: Наука, 1981. - 448 с.
-
Вукобратович М., Стокич Д., Кирчански Н. Неадаптивное и
адаптивное управление манипуляционными роботами. М.: Мир, 1989. 376 с.
-
Ортега Дж. Введение в параллельные и векторные методы решения
линейных систем: Пер. с англ. М.: Мир, 1991. 367 с.
-
Slotine J.J.E., Li W. Composite Adaptive Control of Robot
Manipulators // Automatica. 1989. Vol.25, N4. P. 509-519.
-
Борцов Ю.А., Поляхов Н.Д., Путов В.В. ЭМС с адаптивным
и модальным управлением. Л.: Энергоатомиздат, 1984 г.
-
Транспьютерные сети в задачах управления и моделирования
сложных электромеханических объектов / Ю.А.Борцов, В.Б.Второв, Д.Ю.Иншаков,
А.Я.Почкаев // Известия ГЭТУ. Сб. научн. трудов. Вып. 492. СПб. 1996. C.
86-92.
-
Transputer-based adaptive control and simulation systems
for robotics / Yu.Bortsov, V.Vtorov, D.Inshakov, A.Savilov // Annual report.
1995. Projects in Massively Parallel Computing / St.-Petersburg Centre
for parallel computer technologies. 1995. P. 39-45.( http://freya.etu.ru/an_reports/report_1995/content.html
)
|

{kind=link}